- Applications
- Tools
AndroControl - Robots by phone
Images



Introduction
This app is made to control wifi robots.
You will have a virtual remote control in your phone that can control quadcopters, hover craft and etc. Notice that it can use your phone sensors to control them.
To config microcontroller and use this app efficiently, you should know electronics. You can use any module that makes a server and gives you an ip and port.
You can receive data directly in windows by terminal programs like hercules.
Modes:
Sensor:
Uses you phone sensors to control pitch and roll degrees. By disabling chokemode in settings, sensor mode will be enabled. If your phone doesn't have necessary sensors, using sensor mode is not possible.
Chokemode :
By touching the right button you can manually control pitch and roll.
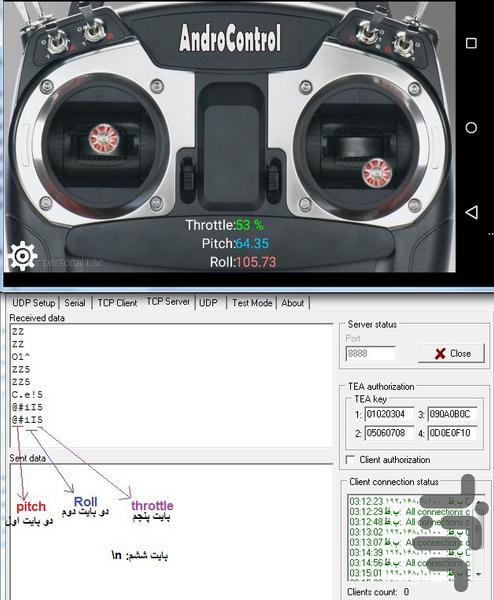
Sent data format:
This app will send 6 bytes to thhe ip and port you have specified at first.
Byte1: The correct part of pitch value.
Byte2: The decimal part of pitch value that you can mix with correct part in microcontroller.
Byte3: The correct part of roll value.
Byte4: The decimal part of roll value.
Byte5: The throttle value.
Byte6: \n character.
Degree range is 45 to 135.
Throttle range is 0 to 100.
By specifying delay value in settings, fter sending 6 bytes, delay occurs and so on. Default is 1 ms.


