| نصب | +۵ هزار |
| از ۲۷ رأی | ۱.۹ |
| دستهبندی | ابزارها |
| حجم | ۲ مگابایت |
| آخرین بروزرسانی | ۲۶ اسفند ۱۳۹۵ |
| نصب | +۵ هزار |
| از ۲۷ رأی | ۱.۹ |
| دستهبندی | ابزارها |
| حجم | ۲ مگابایت |
| آخرین بروزرسانی | ۲۶ اسفند ۱۳۹۵ |
تصاویر برنامه



معرفی برنامه
برنامه اندروید کنترل ربات
این برنامه برای کنترل ربات های مجهز به wifi ساخته شده است.
یک ریموت کنترل مجازی در موبایل خود خواهید داشت که میتوان با آن کواد کوپتر، هاورکرفت و... را کنترل کرد. نکته قابل توجه این است که میتوانید از سنسور های تلفن همراه جهت کنترل آنها استفاده کنید.
برای کانفیگ میکروکنترلر و استفاده بهینه از این برنامه دانش الکترونیک نیاز است. از هر ماژولی که سرور ایجاد کند و یک آیپی و پورت به شما بدهد میتوانید استفاده کنید.
میتوانید با استفاده از ترمینال هایی مانند hercules، مقادیر را به طور مستقیم در ویندوز دریافت کنید.
Mode ها:
سنسور:
از سنسور های تلفن همراه شما برای کنترل زاویه pitch و roll استفاده میکند. با غیر فعال کردن حالت chokemode در تنظیمات میتوانید آنرا فعال کنید. در صورتیکه گوشی شما سنسور های لازم را نداشته باشد استفاده از حالت سنسور امکان پذیر نخواهد بود.
Chokemode:
با استفاده از لمس صفحه گوشی (دکمه سمت راست) میتوانید pitch و roll را به صورت دستی کنترل کنید.
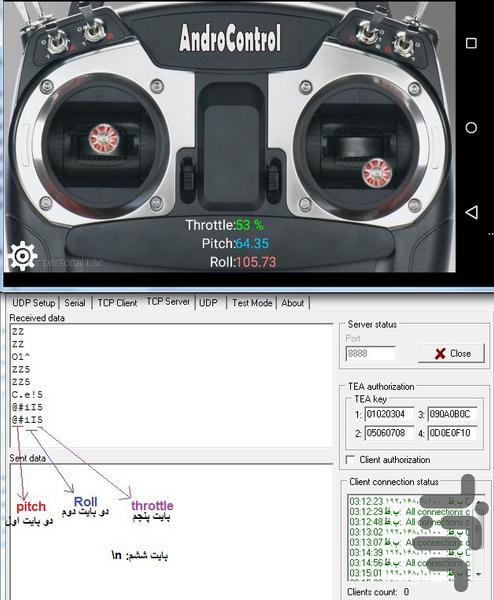
فرمت بایت های ارسالی:
این برنامه 6 بایت را به آیپی و پورتی که در آغاز مشخص کرده اید ارسال میکند.
بایت1: قسمت صحیح مقدار pitch
بایت2: قسمت اعشاری مقدار pitch که میتوانید آنرا در میکروکنترلر به مقدار صحیح اضافه کنید.
بایت3: قسمت صحیح roll
بایت4: قسمت اعشاری roll
بایت5: مقدار throttle
بایت6: کاراکتر n\
زاویه ها از 45 درجه تا 135 درجه تغییر میکنند.
مقدار throttle از 0 تا 100 تغییر میکند.
با مشخص کردن مقدار delay در تنظیمات، بعد از ارسال 6 بایت اطلاعات، وقفه اعمال خواهد شد و همینطور الی آخر. مقدار پیشفرض 1 میلی ثانیه است.


